Лопасти несущего винта вертолета надо построить так, чтобы они, создавая необходимую подъемную силу, выдерживали все возникающие на них нагрузки. И не просто выдерживали, а имели бы еще запас прочности на всякие непредвиденные случаи, которые могут встретиться в полете и при техническом обслуживании вертолета на земле (например, резкий порыв ветра, восходящий поток воздуха, резкий маневр, обледенение лопастей, неумелая раскрутка винта после запуска двигателя и т. д.).
Одним из расчетных режимов для подбора несущего винта вертолета является режим вертикального набора на любой избранной для расчета высоте. На этом режиме из-за отсутствия поступательной скорости в плоскости вращения винта потребная мощность имеет большую величину.
Зная приблизительно вес конструируемого вертолета и задаваясь величиной полезной нагрузки, которую должен будет поднимать вертолет, приступают к подбору винта. Подбор винта сводится к тому, чтобы выбрать такой диаметр винта и такое число его оборотов в минуту, при которых бы расчетный груз мог быть поднят винтом отвесно вверх с наименьшей затратой мощности.
При этом известно, что тяга несущего винта пропорциональна четвертой степени его диаметра и только второй степени числа оборотов, т. е. тяга, развиваемая несущим винтом, более зависит от диаметра, чем от числа оборотов. Поэтому заданную тягу легче получить увеличением диаметра, чем увеличением числа оборотов. Так, например, увеличив диаметр в 2 раза, получим тягу в 24 = 16 раз большую, а увеличив число оборотов в два раза, получим тягу только в 22 = 4 раза большую.
Зная мощность двигателя, который будет установлен на вертолете для приведения во вращение несущего винта, сначала подбирают диаметр несущего винта. Для этого применяют следующее соотношение:
Лопасть несущего винта работает в очень тяжелых условиях. На нее действуют аэродинамические силы, которые ее изгибают, скручивают, разрывают, стремятся оторвать от нее обшивку. Чтобы «противостоять» такому действию аэродинамических сил, лопасть должна быть достаточно прочной.
При полетах в дождь, в снег или в облаках при условиях, способствующих обледенению, работа лопасти еще более усложняется. Капли дождя, попадая на лопасть с огромным» скоростями, сбивают с нее краску. При обледенении па лопастях образуются ледяные наросты, которые искажают ее профиль, мешают ее маховому движению, утяжеляют ее. При хранении вертолета на земле на лопасть разрушающе действуют резкие изменения температуры, влажность, солнечные лучи.
Значит, лопасть должна быть не только прочной, но она еще должна быть невосприимчивой к влиянию внешней среды. Но если бы только это! Тогда лопасть можно было бы сделать цельнометаллической, покрыв ее противо-коррозийным слоем, и задача была бы решена.
Но есть еще одно требование: лопасть, кроме этого, должна быть еще и легкой. Поэтому ее изготовляют полой За основу конструкции лопасти берут металлический лонжерон, чаще всего - стальную трубу переменного сечения, площадь которого постепенно или ступенчато уменьшается от корневой части к концу лопасти.
Лонжерон, как главный продольный силовой элемент лопасти, воспринимает перерезывающие силы и изгибающий момент. В этом отношении работа лонжерона лопасти схожа с работой лонжерона самолетного крыла. Однако на лонжерон лопасти действуют в результате вращения винта еще центробежные силы, чего нет у лонжерона крыла самолета. Под действием этих сил лонжерон лопасти подвергается растяжению.
К лонжерону привариваются или приклепываются стальные фланцы для крепления поперечного силового набора - нервюр лопасти. Каждая нервюра, которая может быть металлической или деревянной, состоит из стенок и полок. К металлическим полкам приклеивается или приваривается металлическая обшивка, а к деревянным полкам приклеивается фанерная или пришивается полотняная обшивка или к носку приклеивается фанерная обшивка, а к хвостику пришивается полотняная, как показано. В носовой части профиля полки нервюр крепятся к переднему стрингеру, а в хвостовой части - к заднему стрингеру. Стрингеры служат вспомогательными продольными силовыми элементами.
Обшивка, покрывающая полки нервюр, образует собой профиль лопасти в любом ее сечении. Наиболее легкой является полотняная обшивка. Однако во избежание искажения профиля в результате прогиба полотняной обшивки на участках между нервюрами, нервюры лопасти приходится ставить очень часто, примерно через 5-6 см одна от другой, что утяжеляет лопасть. Поверхность лопасти с плохо натянутой полотняной обшивкой выглядит ребристой и обладает низкими аэродинамическими качествами, так как ее лобовое сопротивление велико. В процессе одного оборота профиль такой лопасти меняется, что способствует появлению дополнительной вибрации вертолета. Поэтому полотняная обшивка пропитывается аэролаком, который по мере своего высыхания сильно натягивает полотно.
При изготовлении обшивки из фанеры жесткость лопасти увеличивается и расстояние между нервюрами может быть увеличено в 2,5 раза по сравнению с лопастями, обтянутыми полотном. Для того чтобы уменьшить сопротивление, поверхность фанеры гладко обрабатывается и полируется.
Хороших аэродинамических форм и большой прочности можно добиться, если изготовить полую цельнометаллическую лопасть. Трудность ее производства состоит в изготовлении переменного по сечению лонжерона, который образует носовую часть профиля. Хвостовая часть профиля лопасти изготовляется из листовой металлической обшивки, которую передними кромками заподлицо приваривают к лонжерону, а задние кромки склепывают между собой.
Профиль лопасти винта вертолета выбирается с таким расчетом, чтобы при увеличении угла атаки срыв обтекания возникал на возможно больших углах атаки. Это необходимо для того, чтобы избежать срыва обтекания на отступающей лопасти, где углы атаки особенно велики. Кроме того, во избежание вибраций профиль надо подобрать такой, у которого бы при изменении угла атаки не менялось положение центра давления.
Очень важным фактором для прочности и работы лопасти является взаимное расположение центра давления и центра тяжести профиля. Дело в том, что при совместном действии изгиба и кручения, лопасть подвержена самовозбуждающейся вибрации, т. е. вибрации со все возрастающей амплитудой (флаттеру). Во избежание вибрации лопасть должна балансироваться относительно хорды, т. е. должно быть обеспечено такое положение центра тяжести на хорде, которое исключало бы самовозрастание вибрации. Задача балансировки сводится к тому, чтобы у построенной лопасти центр тяжести профиля находился впереди центра давления.
Продолжая рассматривать тяжелые условия работы лопасти несущего винта, необходимо отметить, что повреждение деревянной обшивки лопасти каплями дождя может быть предотвращено, если вдоль ее передней кромки укрепить листовую металлическую окантовку.
Борьба же с обледенением лопастей представляет собой более сложную задачу. Если такие виды обледенения в полете, как иней и изморозь, большой опасности для вертолета не представляют, то стекловидный лед, постепенно и незаметно, но чрезвычайно прочно наращивающийся на лопасти, приводит к утяжелению лопасти, искажению ее профиля и, в конечном счете, к уменьшению подъемной силы, что приводит к резкой потере управляемости и устойчивости вертолета.
Существовавшая одно время теория о том, что лед вследствие машущего движения лопастей будет в полете скалываться, оказалась несостоятельной. Обледенение лопасти начинается раньше всего у корневой части, где изгиб лопасти при ее машущем движении невелик. В дальнейшем слой льда начинает распространяться все дальше к концу лопасти, постепенно сходя на нет. Известны случаи, когда толщина льда у корневой части достигала 6 мм, а у конца лопасти - 2 мм.
Предотвратить обледенение возможно двумя путями.
Первый путь - это тщательное изучение прогноза погоды в районе полетов, обход встретившихся по пути облаков и изменение высоты полета с целью выхода из воны обледенения, прекращение полета и т. д.
Второй путь - это оборудование лопастей противо-обледенительными устройствами.
Известен целый рад этих устройств для лопастей вертолета. Для удаления льда с лопастей несущего винта может
быть применен спиртовой противообледенитель, который разбрызгивает на передней кромке винта спирт. Последний, смешиваясь с водой, понижает температуру ее замерзания и препятствует образованию льда.
Скалывание льда с лопастей винта может быть осуществлено воздухом, который нагнетается в резиновую камеру, проложенную вдоль передней кромки несущего винта. Раздувающаяся камера надкалывает ледяную корку, отдельные куски которой затем сметаются с лопастей винта встречным потоком воздуха.
Если передняя кромка лопасти винта сделана из металла, то ее можно подогревать или электричеством, или теплым воздухом, пропускаемым через трубопровод, проложенный вдоль передней кромки несущего винта.
Будущее покажет, какой из этих способов найдет себе более широкое применение.
Для аэродинамических характеристик несущего винта большое значение имеют число лопастей несущего винта, и удельная нагрузка на ометаемую винтом площадь. Теоретически число лопастей винта может быть любым, от одной бесконечно большого их числа, настолько большого, что они в конечном счете сливаются в спиральную поверхность, как это предполагалось в проекте Леонардо да Винчи или в вертолете-велосипеде И. Быкова.
Однако есть какое-то наиболее выгодное число лопастей. Число лопастей не должно быть меньше трех, так как при двух лопастях возникают большие неуравновешенные силы и колебания тяги винта. Показано изменение тяги несущего винта около его среднего значения в течение одного оборота винта у однолопастного и двухлопастного винтов. Трехлопастной винт уже практически сохраняет среднее значение тяги в течение всего оборота.
Число лопастей винта не должно быть также очень большим, так как в этом случае каждая лопасть работает в потоке, возмущенном предыдущей лопастью, что снижает коэффициент полезного действия несущего винта.
Чем больше лопастей винта, тем большую часть площади ометаемого диска они занимают. В теорию несущего винта вертолета введено понятие коэффициента заполнения о, который подсчитывается как отношение суммарной площади
Для расчетного режима работы несущего винта вертолета (отвесный подъем) наивыгоднейшей величиной коэффициента заполнения является величина 0,05-0,08 (среднее значение 0,065).
Эта нагрузка является средней. Малой нагрузкой называют нагрузку в пределах 9-12 кг/м2. Вертолеты, имеющие такую нагрузку, маневренны и обладают большой крейсерской скоростью.
Вертолеты общего назначения имеют среднюю нагрузку в пределах от 12 до 20 кг/м2. И, наконец, большой нагрузкой, редко применяемой, является нагрузка от 20 до 30 кг/м2.
Дело в том, что хотя высокая удельная нагрузка на ометаемую площадь и обеспечивает большую полезную нагрузку вертолета, но при отказе двигателя такой вертолет на режиме самовращения будет снижаться быстро, что недопустимо, так как в этом случае нарушается безопасность снижения.
Центробежный вентилятор — устройство механического типа, которое способно работать с воздушными или газовыми потоками, имеющими низкий уровень увеличения давления. Крутящаяся крыльчатка обеспечивает движение воздушных масс. Система работы заключается в том, что кинетическая энергия увеличивает давление потока, который и оказывает противодействие всем воздуховодам и заслонкам.
Центробежный вентилятор намного мощнее осевого, при этом имеет экономных расход электроэнергии.
Данное устройство позволяет изменить направление воздушной массы с уклоном в 90 градусов. При этом во время работы вентиляторы не создают много шума, а за счет своей надежности их диапазон рабочих условий достаточно широк.
Некоторые особенности
Хотелось бы обратить внимание, что принцип действия центробежного вентилятора построен таким образом, что он качает постоянный объем воздуха, а не массу, что позволяет фиксировать скорость расхода воздуха. Кроме того, такие модели намного экономичней, чем осевые аналоги, а конструкцию при этом имеют проще.

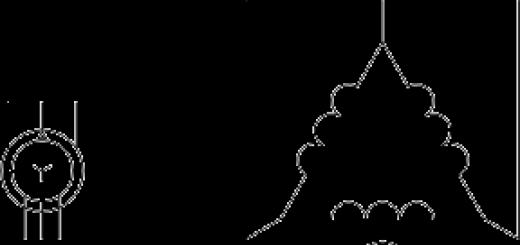
Схема элементов центробежного вентилятора: 1 – ступица, 2 – основной диск, 3 – рабочие лопатки, 4 – передний диск, 5 – лопастная решетка, 6 – корпус, 7 – шкив, 8 – подшипники, 9 – станина, 10, 11 – фланцы.
Автопромышленность использует данные вентиляторы, чтобы охлаждать двигатели внутреннего сгорания, которые отдают «в пользование» свою энергию такому аппарату. Также это вентиляционное устройство применяется для перемещения газовых смесей и материалов в вентиляционных системах.
Могут использоваться как одно из составляющих систем отопления или охлаждения. Такая техника применима и с целью очистки и фильтрации промышленных систем.
Для обеспечения нужного уровня давления и расхода используется обычно целая серия вентиляторов. Конечно, центробежные модели имеют более высокую мощность, но при этом остаются экономичными (всего лишь 12% затрат от электричества).
Устройство центробежного вентилятора состоит из крыльчатки, которая оснащена несколькими шеренгами лопастей (ребер). В центре расположен вал, который проходит через весь корпус. Воздушные массы попадают с края, где находятся лопасти, далее за счет конструкции происходит их поворот на 90 градусов, а затем благодаря центробежной силе они разгоняются еще больше.
Вернуться к оглавлению
Типы приводных механизмов

Во многом на работу вентилятора, а именно на вращение лопастей, влияет тип привода. На сегодняшний день их 3:
- Прямой. В данном случае крыльчатка напрямую соединена с валом двигателя. От скорости вращения мотора будет зависеть и скорость лопастей. В качестве недостатка этой модели выделяют следующие: если двигатель не имеет регулировки своей скорости, то и вентилятор будет работать в одном режиме. Но если учесть, что холодный воздух имеет более высокую плотность, то кондиционирование будет само по себе происходить быстрее.
- Ременный. В данном типе устройства имеются шкивы, которые расположены на валу двигателя и крыльчатки. Соотношение диаметров шкивов обоих элементов влияют на скорость работы лопастей.
- Регулируемый. Тут регулировка скорости происходит за счет наличия гидравлической или магнитной муфты. Ее месторасположение — промеж валов мотора и импеллера. Чтобы проще было осуществить этот процесс, такие центробежные вентиляторы имеют автоматизированные системы.
Вернуться к оглавлению
Составляющие центробежного вентилятора

Схема рабочих колес центробежных вентиляторов: а – барабанная, б – кольцевая, в, г – с коническими покрывающими дисками, д — однодисковые, е — бездисковые.
Как и любая другая техника, вентилятор будет исправно работать только при соответствующих элементах конструкции.
- Подшипники. Чаще всего данный тип устройства имеет маслонаполненные подшипники роликового типа скольжения. Отдельные модели могут обладать водяной системой охлаждения, которая чаще всего применяется в работе с горячими газами, что предотвращает перегрев подшипников.
- Лопасти и заслонки. Основная функция заслонок — управление газовыми потоками при входе и выходе. Отдельные модели центробежных эксгаустеров могут иметь их с обеих сторон или только с одной — входа или выхода. «Входящие» заслонки управляют количеством поступаемого газа или воздуха, а «выходящие» сопротивляются воздушному потоку, который управляет газом. Заслонки, что расположены на входе лопастей, способствуют уменьшению потребления электроэнергии.
Сами плицы находятся на втулке колеса центростремительного вентилятора. Есть три стандартных расположения лопастей:
- лопасти загнуты вперед;
- лопасти загнуты назад;
- лопасти прямые.
В первом варианте лопасти имеют лезвия с направлением по движению колеса. Такие вентиляторы «не любят» твердых примесей в эрлифтных потоках. Основное их назначение — большой поток с низким давлением.
Второй вариант оснащен искривленными лезвиями против движения колеса. Таким образом достигается аэродинамический швеллер и относительная экономичность конструкции. Такой способ применяется в работе с потоками газовой консистенции низкого и умеренного уровня насыщения жесткими компонентами. В качестве дополнения имеют покрытие от повреждений. Очень удобно то, что такой центробежный вентилятор имеет широкий диапазон регулировок скоростей. Они намного эффективней моделей с лопастями, изогнутыми вперед или прямыми, хотя последние и стоят дешевле.
Третий вариант имеет лопасти, которые расширяются сразу от втулки. Такие модели имеют минимальную чувствительность к оседанию твердых частиц на лопастях вентилятора, но при этом издают много шума во время эксплуатации. Также они имеют быстрый темп работы, низкие объемы и высокий уровень давления. Часто используют с целью аспирации, в пневматических системах для транспортировки материалов и в других схожих работах.
Вернуться к оглавлению
Типы центробежных вентиляторов

Есть определенные стандарты, по которым изготавливается данная техника. Следует выделить следующие типы:
- Аэродинамическое крыло. Такие модели имеют широкое применение в сфере непрерывных работ, где постоянно присутствуют высокие температуры, чаще всего это нагнетательные и вытяжные системы. Имея высокий показатель по производительности, они бесшумны.
- Обратно загнутые лопасти. Обладают высокой эффективностью. Конструкция этих вентиляторов препятствует накоплению пыли и мелких частиц на лопастях. Имеет достаточно прочную конструкцию, что позволяет применять их для областей с высоким угнетением.
- Ребра, изогнутые в обратную сторону. Рассчитаны для большой кубатуры воздушных масс с относительно низким уровнем давления.
- Радиальные лопасти. Достаточно прочны, могут обеспечить высокое давление, но со средним уровнем эффективности. Направляющие ротора имеют специальное покрытие, которое защищает их от эрозии. Кроме того, такие модели имеют достаточно компактные габариты.
- Ребра, загнутые вперед. Предназначены для тех случаев, когда предстоит работа с большими объемами воздушных масс и наблюдается высокое давление. Эти модели тоже имеют хорошую стойкость к эрозии. В отличие от моделей «заднего» типа такие агрегаты имеют меньшие размеры. Такой вид крыльчатки имеет самый большой расход объема.
- Гребное колесо. Данное устройство — открытое колесо без какого-либо корпуса или кожуха. Применим для помещений, где присутствует большая запыленность, но при этом, увы, такие устройства не обладают высокой эффективностью. Допустимо использование при высоких температурах.
За последнее время в мире вертолетной техники произошло несколько значимых событий. Американская компания Kaman Aerospace объявила о намерении возобновить производство синхроптеров, Airbus Helicopters пообещала разработать первый гражданский вертолет с электродистанционным управлением, а немецкая e-volo - испытать 18-роторный двухместный мультикоптер. Чтобы не запутаться во всем этом разнообразии, мы решили составить краткий ликбез по основным схемам вертолетной техники.
Впервые идея летательного аппарата с несущим винтом появилась около 400 года нашей эры в Китае, однако дальше создания детской игрушки дело не пошло. Всерьез инженеры взялись за создание вертолета в конце XIX века, а первый вертикальный полет нового типа летательного аппарата состоялся в 1907 году, спустя всего четыре года после первого полета братьев Райт. В 1922 году авиаконструктор Георгий Ботезат испытал вертолет-квадрокоптер, разработанный по заказу Армии США. Это был первый в истории устойчиво управляемый полет техники такого типа. Квадрокоптер Ботезата сумел взлететь на высоту пяти метров и провел в полете несколько минут.
С тех пор вертолетная техника претерпела множество изменений. Появился класс винтокрылых летательных аппаратов, который сегодня делится на пять типов: автожир, вертолет, винтокрыл, конвертоплан и X-крыло. Все они отличаются конструкцией, способом взлета и полета, управлением несущим винтом. В этом материале мы решили рассказать именно о вертолетах и их основных типах. При этом за основу была взята классификация по компоновке и расположению несущих винтов, а не традиционная - по типу компенсации реактивного момента несущего винта.

Вертолет является винтокрылым летательным аппаратом, у которого подъемная и движущая силы создаются одним или несколькими несущими винтами. Такие винты располагаются параллельно земле, а их лопасти устанавливаются под определенным углом к плоскости вращения, причем угол установки может изменяться в достаточно широких пределах - от нуля до 30 градусов. Установка лопастей на ноль градусов называется холостым ходом винта или флюгированием. В этом случае несущий винт не создает подъемной силы.
Во время вращения лопасти захватывают воздух и отбрасывают его в направлении, противоположном движению винта. В результате перед винтом создается зона пониженного давления, а за ним - повышенного. В случае вертолета так возникает подъемная сила, которая очень похожа на образование подъемной силы фиксированным крылом самолета. Чем больше угол установки лопастей, тем большую подъемную силу создает несущий винт.
Характеристики несущего винта определяются двумя основными параметрами - диаметром и шагом. Диаметр винта определяет возможности вертолета по взлету и посадке, а также отчасти величину подъемной силы. Шаг винта - это воображаемое расстояние, которое воздушный винт пройдет в несжимаемой среде при определенном угле установки лопастей за один оборот. Последний параметр влияет на подъемную силу и скорость вращения ротора, которую на большей части полета летчики стараются держать неизменной, меняя только угол установки лопастей.

При полете вертолета вперед и вращении несущего винта по часовой стрелке, набегающий поток воздуха сильнее воздействует на лопасти с левой стороны, из-за чего возрастает и их эффективность. В результате левая половина окружности вращения винта создает большую подъемную силу, чем правая, и возникает кренящий момент. Для его компенсации конструкторы придумали - это особая система, которая уменьшает угол установки лопастей слева и увеличивает его справа, выравнивая таким образом подъемную силу по обе стороны винта.
В целом, вертолет имеет несколько преимуществ и несколько недостатков перед самолетом. К преимуществам относится возможность вертикального взлета и посадки на площадки, диаметр которых в полтора раза превосходит диаметр несущего винта. При этом вертолет может на внешней подвеске перевозить крупногабаритные грузы. Вертолеты отличаются и лучшей маневренностью, поскольку могут висеть вертикально, лететь боком или задом-наперед, поворачиваться на месте.
К недостаткам же относятся большее, чем у самолетов, потребление топлива, большая инфракрасная заметность из-за горячего выхлопа двигателя или двигателей, а также повышенная шумность. Кроме того, вертолетом в целом сложнее управлять из-за ряда особенностей. Например, летчикам вертолетов знакомы явления земного резонанса, флаттера, вихревого кольца, эффекта запирания несущего винта. Эти факторы могут приводить к разрушению или падению машины.

У вертолетной техники любых схем существует режим авторотации. Он относится к аварийным режимам. Это означает, что при отказе, например, двигателя несущий винт или винты при помощи обгонной муфты отсоединяются от трансмиссии и начинают свободно раскручиваться набегающим потоком воздуха, тормозя падение машины с высоты. В режиме авторотации возможна управляемая аварийная посадка вертолета, причем вращающийся несущий винт через редуктор продолжает раскручивать рулевой винт и генератор.

Классическая схема
Из всех типов вертолетных схем сегодня самой распространенной является классическая. При такой схеме машина имеет только один несущий винт, который может приводиться в движение одним, двумя или даже тремя двигателями. К этому типу, например, относятся ударные AH-64E Guardian, AH-1Z Viper, Ми-28Н, транспортно-боевые Ми-24 и Ми-35, транспортные Ми-26, многоцелевые UH-60L Black Hawk и Ми-17, легкие Bell 407 и Robinson R22.
При вращении несущего винта на вертолетах классической схемы возникает реактивный момент, из-за которого корпус машины начинает раскручиваться в сторону, противоположную вращению ротора. Для компенсации момента используют рулевое устройство на хвостовой балке. Как правило им является рулевой винт, но это может быть и фенестрон (винт в кольцевом обтекателе) или несколько воздушных сопел на хвостовой балке.

Особенностью классической схемы являются перекрестные связи в каналах управления, обусловленные тем, что рулевой винт и несущий приводятся одним и тем же двигателем, а также наличием автомата перекоса и множества других подсистем, ответственных за управление силовой установкой и роторами. Перекрестная связь означает, что при изменении какого-либо параметра работы воздушного винта, поменяются и все остальные. Например, при увеличении частоты вращения несущего винта возрастет и частота вращения рулевого.
Управление полетом осуществляется наклоном оси вращения несущего винта: вперед - машина полетит вперед, назад - назад, вбок - вбок. При наклоне оси вращения возникнет движущая сила и уменьшается подъемная. По этой причине для сохранения высоты полета летчику необходимо менять и угол установки лопастей. Направление полета задается изменением шага рулевого винта: чем он меньше, тем меньше компенсируется реактивный момент, и вертолет поворачивает в сторону, противоположную вращению несущего винта. И наоборот.
В современных вертолетах в большинстве случаев управление полетом по горизонтали осуществляется при помощи автомата перекоса. Например, для движения вперед летчик при помощи автомата уменьшает угол установки лопастей для передней половины плоскости вращения крыла и увеличивает - для задней. Таким образом сзади подъемная сила увеличивается, а спереди - уменьшается, благодаря чему изменяется наклон винта и появляется движущая сила. Такая схема управления полетом применяется на всех вертолетах почти всех типов, если на них установлен автомат перекоса.

Соосная схема

Второй по распространенности вертолетной схемой является соосная. В ней рулевой винт отсутствует, зато есть два несущих винта - верхний и нижний. Они располагаются на одной оси и вращаются синхронно в противоположных направлениях. Благодаря такому решению винты компенсируют реактивный момент, а сама машина получается несколько более устойчивой по сравнению с классической схемой. Кроме того, у вертолетов соосной схемы практически отсутствуют перекрестные связи в каналах управления.

Наиболее известным производителем вертолетов соосной схемы является российская компания «Камов». Она выпускает корабельные многоцелевые вертолеты Ка-27, ударные Ка-52 и транспортные Ка-226. Все они имеют по два винта, расположенных на одной оси друг под другом. Машины соосной схемы, в отличие от вертолетов классической схемы, способны, например, делать воронку, то есть выполнять облет цели по кругу, оставаясь на одном и том же расстоянии от нее. При этом носовая часть всегда остается развернутой в сторону цели. Управление рысканием осуществляется подтормаживанием одного из несущих винтов.

В целом управлять вертолетами соосной схемы несколько проще, чем обычными, особенно в режиме висения. Но существуют и свои особенности. Например, при выполнении петли в полете может случиться перехлест лопастей нижнего и верхнего несущего винтов. Кроме того, в проектировании и производстве соосная схема более сложна и дорога, чем классическая схема. В частности из-за редуктора, передающего вращение вала двигателя на винты, а также автомата перекоса, синхронно устанавливающего угол лопастей на винтах.

Продольная и поперечная схемы

Третьей по популярности является продольная схема расположения несущих винтов вертолета. В этом случае винты располагаются параллельно земле на разных осях и разнесены друг от друга - один находится над носовой частью вертолета, а другой - над хвостовой. Типичным представителем машин такой схемы является американский тяжелый транспортный вертолет CH-47G Chinook и его модификации. Если винты располагаются на законцовках крыльев вертолета, то такая схема называется поперечной.
Серийных представителей вертолетов поперечной схемы сегодня не существует. В 1960-1970-х годах конструкторское бюро Миля разрабатывало тяжелый грузовой вертолет В-12 (также известен, как Ми-12, хотя этот индекс неверен) поперечной схемы. В августе 1969 года прототип В-12 установил рекорд грузоподъемности среди вертолетов, подняв на высоту 2,2 тысячи метров груз массой 44,2 тонны. Для сравнения самый грузоподъемный в мире вертолет Ми-26 (классическая схема) может поднимать грузы массой до 20 тонн, а американский CH-47F (продольная схема) - массой до 12,7 тонны.

У вертолетов продольной схемы несущие винты вращаются в противоположных направлениях, однако это компенсирует реактивные моменты лишь отчасти, из-за чего в полете летчикам приходится учитывать возникающую боковую силу, уводящую машину с курса. Движение в стороны задается не только наклоном оси вращения несущих винтов, но и разными углами установки лопастей, а управление рысканием производится за счет изменения частоты вращения роторов. Задний винт у вертолетов продольной схемы всегда располагается чуть выше переднего. Это сделано для исключения взаимного влияния от их воздушных потоков.
Кроме того, на определенных скоростях полета вертолетов продольной схемы иногда могут возникать значительные вибрации. Наконец, вертолеты продольной схемы оснащаются сложной трансмиссией. По этой причине такая схема расположения винтов распространена мало. Зато вертолеты продольной схемы меньше других машин подвержены возникновению вихревого кольца. В этом случае во время снижения воздушные потоки, создаваемые винтом, отражаются от земли вверх, затягиваются винтом и снова направляются вниз. При этом подъемная сила несущего винта резко снижается, а изменение частоты вращения ротора или увеличение угла установки лопастей эффекта практически не оказывает.

Синхроптер
Сегодня вертолеты, построенные по схеме синхроптера, можно отнести к самым редким и наиболее интересными с конструктивной точки зрения машинами. Их производством до 2003 года занималась только американская компания Kaman Aerospace. В 2017 году компания планирует возобновить выпуск таких машин под обозначением K-Max. Синхроптеры можно было бы отнести к вертолетам поперечной схемы, поскольку валы двух их винтов расположены по бокам корпуса. Однако оси вращения этих винтов расположены под углом другу к другу, а плоскости вращения - пересекаются.
У синхроптеров, как у вертолетов соосной, продольной и поперечной схем, рулевой винт отсутствует. Несущие же винты вращаются синхронно в противоположные стороны, а их валы связаны друг с другом жесткой механической системой. Это гарантированно предотвращает столкновение лопастей при разных режимах и скоростях полета. Впервые синхроптеры были изобретены немцами во время второй мировой войны, однако серийное производство велось уже в США с 1945 года компанией Kaman.

Направлением полета синхроптера управляют исключительно изменением угла установки лопастей винтов. При этом из-за перекрещивания плоскостей вращения винтов, а значит сложения подъемных сил в местах перекрещивания, возникает момент кабрирования, то есть подъема носовой части. Этот момент компенсируется системой управления. В целом же, считается, что синхроптером проще управлять в режиме висения и на скоростях больше 60 километров в час.
К достоинствам таких вертолетов относится экономия топлива за счет отказа от рулевого винта и возможность более компактного размещения агрегатов. Кроме того, синхроптерам характерна большая часть положительных качеств вертолетов соосной схемы. К недостаткам же относится необычайная сложность механической жесткой связи валов винтов и системы управления автоматами перекоса. В целом это делает вертолет дороже, по сравнению с классической схемой.

Мультикоптер

Разработка мультикоптеров началась практически одновременно с работами над вертолетом. Именно по этой причине первым вертолетом, совершившим управляемый взлет и посадку стал в 1922 году квадрокоптер Ботезата. К мультикоптерам относят машины, как правило имеющие четное количество несущих винтов, причем их должно быть больше двух. В серийных вертолетах сегодня схема мультикоптеров не используется, однако она чрезвычайно популярна у производителей малой беспилотной техники.
Дело в том, что в мультикоптерах используются винты с неизменяемым шагом винта, причем каждый из них приводится в движение своим двигателем. Компенсация реактивного момента производится вращением винтов в разные стороны - половина крутится по часовой стрелке, а другая половина, расположенная по диагонали, - в противоположном направлении. Это позволяет отказаться от автомата перекоса и в целом значительно упростить управление аппаратом.
Для взлета мультикоптера частота вращения всех винтов увеличивается одинаково, для полета в сторону - вращение винтов на одной половине аппарата ускоряется, а на другой - замедляется. Поворот мультикоптера производится замедлением вращения, например, винтов, крутящихся по часовой стрелке или наоборот. Такая простота конструкции и управления и послужила основным толчком к созданию квадрокоптера Ботезата, однако последующее изобретение рулевого винта и автомата перекоса практически затормозило работы над мультикоптерами.

Причиной же, по которой сегодня не существует мультикоптеров, предназначенных для перевозки людей, является безопасность полетов. Дело в том, что в отличие от всех остальных вертолетов, машины с несколькими винтами не могут совершать аварийную посадку в режиме авторотации. При отказе всех двигателей мультикоптер становится неуправляемым. Впрочем, вероятность такого события невысока, однако отсутствие режима авторотации является главным препятствием для прохождении сертификации на безопасность полетов.
Впрочем, в настоящее время немецкая компания e-volo занимается разработкой мультикоптера с 18 роторами. Этот вертолет предназначен для перевозки двух пассажиров. Как ожидается, он совершит первый полет в ближайшие несколько месяцев. По расчетам конструкторов, прототип машины сможет находиться в воздухе не больше получаса, однако этот показатель планируется довести по меньшей мере до 60 минут.
Следует также отметить, что помимо вертолетов с четным количеством винтов существуют и мультикоптерные схемы с тремя и пятью винтами. У них один из двигателей расположен на отклоняемой в стороны платформе. Благодаря этому осуществляется управление направлением полета. Впрочем, в такой схеме становится сложнее гасить реактивный момент, поскольку два винта из трех или три из пяти всегда вращаются в одном направлении. Для нивелирования реактивного момента некоторые из винтов вращаются быстрее, а это создает ненужную боковую силу.

Скоростная схема

Сегодня наиболее перспективной в вертолетной технике считается скоростная схема, позволяющая вертолетам летать на существенно большей скорости, чем могут современные машины. Чаще всего такую схему называют комбинированным вертолетом. Машины этого типа строятся по соосной схеме или с одним винтом, однако имеют небольшое крыло, создающее дополнительную подъемную силу. Кроме того, вертолеты могут быть оснащены толкающим винтом в хвостовой части или двумя тянущими на законцовках крыла.
Ударные вертолеты классической схемы AH-64E способны развивать скорость до 293 километров в час, а соосные Ка-52 - до 315 километров в час. Для сравнения, комбинированный вертолет - демонстратор технологий Airbus Helicopters X3 с двумя тянущими винтами может разгоняться до 472 километров в час, а его американский конкурент с толкающим винтом - Sikorksy X2 - до 460 километров в час. Перспективный разведывательный скоростной вертолет S-97 Raider сможет летать на скоростях до 440 километров в час.

Строго говоря, комбинированные вертолеты относятся скорее не к вертолетам, а к другому типу винтокрылых летательных аппаратов - винтокрылам. Дело в том, что движущая сила у таких машин создается не только и не столько несущими винтами, сколько толкающими или тянущими. Кроме того, за создание подъемной силы отвечают и несущие винты, и крыло. А на больших скоростях полета управляемая обгонная муфта отключает несущие винты от трансмиссии и дальнейший полет идет уже в режиме авторотации, при которой несущие винты работают, фактически, как крыло самолета.
В настоящее время разработкой скоростных вертолетов, которые в перспективе смогут развивать скорость свыше 600 километров в час, занимаются несколько стран мира. Помимо Sikorsky и Airbus Helicopters такие работы ведут российские «Камов» и конструкторское бюро Миля (Ка-90/92 и Ми-X1 соответственно), а также американская Piacesky Aircraft. Новые комбинированные вертолеты смогут совместить в себе скорость полета турбовинтовых самолетов и вертикальные взлет и посадку, присущие обычным вертолетам.
Фотография: Official U.S. Navy Page / flickr.com
Л
опасти для вертолета как резина для автомобиля. Мягкие лопасти сглаживают реакции вертолета, делают его более ленивым. Жесткие, напротив, заставляют вертолет реагировать на управление без задержек. Тяжелые лопасти замедляют реакции, легкие обостряют. Лопасти с высоким профилем отбирают больше энергии, а с низким склонны к срыву потока, когда подъемная сила резко снижается. Выбирая лопасти, стоит учесть их параметры и выбрать те, что подойдут вашему стилю и опыту больше всего.
Когда мы выбираем лопасти, то в первую очередь смотрим на их длину, поскольку длина лопасти зависит от класса вертолета. Чаще под длиной подразумевается расстояние от крепежного отверстия лопасти до ее концевой части. Некоторые немногочисленные производители указывают полную длину лопасти от комля до концевой части. К счастью таких случаев мало.
От длины зависит подъемная сила, и сопротивление вращения которые создает лопасть. Длинная лопасть способна создать большую подъемную силу, но при этом отнимает больше энергии на вращение. С длинными лопастями модель стабильнее при висении и обладает большей "летучестью", т.е. способна на более крупные маневры и лучше выполняет авторотацию.
Хорда (ширина лопасти)
Важный параметр лопасти, который чаще всего не указывают вовсе, и остается только измерить хорду самостоятельно. Чем шире лопасть, тем больше подъемную силу она может создать при тех же углах атаки и тем резче вертолет при управлении по циклическому шагу. Широкая лопасть имеет более высокое сопротивление вращения и потому сильнее нагружает силовую установку. При использовании лопастей с широкой хордой важна точная работа шагом, иначе можно легко "задушить" мотор. Наибольший разброс ширины встречается у лопастей для вертолетов 50-ого класса и выше.
Длина и хорда.
Материал
Следующее, на что нужно обратить внимание, это материал, из которго сделаны лопасти. Сегодня наиболее распространенные материалы, из которых изготавливают лопасти вертолетов это карбон и стеклопластик. Деревянные лопасти постепенно сходят со сцены, так как не обладают достаточной прочностью и сильно ограничивают вертолет в летных возможностях. К тому же деревянные лопасти склонны к изменению формы, что приводит к постоянному появлению «бабочки». Пожалуй, наименьшее, на что сегодня стоит соглашаться, это стеклопластиковые лопасти. Они не страдают изменением формы, обладают достаточной жесткостью для выполнения легкого 3D и отлично подойдут начинающим вертолетчикам. Пилоты со стажем непременно выберут карбоновые лопасти как наиболее жесткие, позволяющие вертолету выполнять экстремальные фигуры высшего пилотажа и наделяют вертолет молниеносной реакцией на управление.
Важный параметр - вес лопасти. При прочих равных более тяжелая лопасть сделает вертолет более стабильным, снизит скорость управления по циклическому шагу. Тяжелая лопасть добавит стабильности и размеренности и запасет больше энергии при выполнении авторотации, что сделает маневр более комфортным. Если вы стремитесь к 3D полетам, выбирайте более легкие лопасти.
Форма лопасти
Прямая, трапециевидная. Чаще встречается прямая форма, трапециевидная скорее относится к экзотике. Последняя позволяет снизить сопротивление вращения ценой снижения отдачи.

Форма лопасти.
Симметричный - высота профиля одинаковая сверху и снизу лопасти. Лопасти с симметричным профилем способны создавать подъемную силу только при ненулевом шаге. Такие лопасти наиболее распространены среди современных вертолетов и используются на всех моделях, выполняющих 3D пилотаж.
Полусимметричный – снизу лопасти профиль имеет меньшую высоту. Такие лопасти способны создавать подъемную силу даже при нулевых углах атаки, т.е. Создают подъемную силу аналогично тому, как это делает крыло самолета. Такие лопасти используются редко, как правило, только на больших копийных вертолетах.
Высота профиля
Чем выше профиль, тем лучше он сопротивляется срыву потока, но тем выше его сопротивление. Деревянные лопасти обычно имеют более высокий профиль, но лишь для того, что бы обладать достаточной прочностью.

Форма профиля и его высота.
Толщина комля
Толщина комля напрямую связана с размером цапф вашего вертолета. Если комель толще, то лопасть не влезет в цапфу, если наоборот – будет болтаться. Обычно в пределах одного класса вертолетов толщина комля стандартна, тем не менее, при покупке лопастей убедитесь, что они подходят к вашему вертолету. Некоторые производители комплектуют лопасти шайбами-проставками, которые можно использовать, если посадочное место цапфы больше толщины комля. Такие шайбы надо устанавливать парами сверху и снизу комля, что бы лопасть была закреплена по центру цапфы.

Толщина комля.
Диаметр крепежного отверстия
Диаметр отверстия должен совпадать с диаметром крепежного винта цапфы. Как и толщина комля, этот параметр стандартный, тем не менее, стоит его проверить перед покупкой лопастей.
Положение крепежного отверстия относительно наступающей кромки.
Определяет то, насколько наступающая кромка лопасти выступает вперед цапфы. Смещенное назад отверстие приводит к тому, что при вращении лопасть отстает от цапфы, что делает такие лопасти более стабильными. Напротив, смещение отверстия к наступающей кромке заставляет лопасть при вращении выдвигаться вперед цапфы, и такое положение делает лопасть менее стабильной.

Положение крепежного отверстия.
Форма концевой части лопасти.
Форма концевой части влияет на сопротивление вращения ротора. Различают прямую, закругленную и скошенную форму. Более прямая форма создает подъемную силу по всей длине лопасть, но и имеет наибольшее сопротивление вращения.

Форма концевой части лопасти.
Продольный центр тяжести.
Положение центра тяжести в продольном направлении. Чем ближе центр тяжести к концевой части лопасти, тем лопасть более стабильна и лучше выполняет авторотацию. Наоборот, смещение центра тяжести к комлю делает лопасть более маневренной, но страдает накопление лопастью энергии при авторотации.
Поперечный центр тяжести.
Положение центра тяжесть поперек лопасти, от наступающей кромки к отступающей. Обычно стараются размещать центр тяжести так, чтобы при вращении лопасть не отставала от цапфы и не выступала вперед. Лопасть с сильно смещенным назад центром тяжести выступает при вращении вперед цапфы и, следовательно, более динамична.

Продольный и поперечный центр тяжести.
Динамическая балансировка: выступающая/отступающая лопасть.
Параметр зависит от положения крепежного отверстия, веса, положения поперечного и продольного центров тяжести. В целом, если лопасть при вращении выступает вперед цапфы, то такая лопасть более маневренная и больше подходит для 3D полетов, но отбирает больше энергии и делает вертолет недостаточно стабильным. Если напротив лопасть при вращении отстает от цапфы, то такая лопасть более стабильная. Если лопасть не отстает и не выступает, то это нейтральная лопасть. Такая лопасть наиболее универсальная и одинаково хорошо подходит как для маневров висения, так и для 3D полетов.

Динамическая балансировка.
Ночные лопасти.
Ночные лопасти со встроенными светодиодами и встроенным, либо съемным аккумулятором служат для комплектации вертолета для ночных полетов. Совместно с лопастями используются различные способы подсветки корпуса вертолета.
Лопасти с защитным стержнем.
Стержень не дает лопасти разлетаться на отдельные части в случае падения. Очень полезный элемент безопасности, который к сожалению присутствует только в дорогих лопастях известных производителей. Случается, что обломки лопастей, не оборудованных таким стержнем, разлетаются на расстояние до 10 метров от места падения и могут привести к травме.
Типы ветрогенераторов
Ветряки можно различать по:
— количеству лопастей;
— типу материалов лопастей;
— вертикальному или горизонтальному расположению оси установки;
— шаговому варианту лопастей.
По конструкции ветрогенераторы делятся по количеству лопастей, одно, двухлопастные, трехлопастные и многолопастные. Наличие большого числа лопастей позволяет вращать их очень малому ветру. Конструкцию лопастей можно разделить на жесткую и парусную. Парусные ветряки дешевле других, но нуждаются в частом ремонте.
Один из видов ветрогенераторов — горизонтальный
Ветрогенератор вертикального исполнения начинают вращаться при малом ветре. Им не нужен флюгер. Однако по мощности они уступают ветрякам с горизонтальной осью. Шаг лопастей ветрогенераторов может быть фиксированным или изменяемым. Изменяемый шаг лопастей дает возможность увеличивать скорость вращения. Эти ветряки дороже. Конструкции ветряка с фиксированным шагом надежны и просты.
Вертикальный генератор
Эти ветряки менее затратные в обслуживании, так как устанавливаются на небольшой высоте. Также они имеют меньше движущихся частей, легче в ремонте и производстве. Такой вариант установки нетрудно изготовить своими руками.

Ветрогенератор вертикального исполнения
С оптимальными лопастями и своеобразным ротором дает высокий КПД и не зависит от направления ветра. Ветрогенераторы вертикальной конструкции бесшумные. Вертикальный ветрогенератор имеет несколько типов исполнения.
Ортогональные ветрогенераторы

Ортогональный ветрогенератор
Такие ветряки имеют несколько параллельных лопастей, которые устанавливаются на расстоянии от вертикальной оси. На работу ортогональных ветряков не влияет направление ветра. Устанавливаются они на уровне земли, что облегчает монтаж и эксплуатацию установки.

Ветрогенераторы на основе ротора Савониуса
Лопасти этой установки представляют собой особые полуцилиндры, которые создают высокий крутящий момент. Из недостатков этих ветряков можно выделить большую материалоемкость и не высокую эффективность. Для получения высокого крутящего момента с ротором Савониуса устанавливают еще ротор Дарье.
Ветряки с ротором Дарье
Наряду с ротором Дарье эти установки имеют ряд пар лопастей с оригинальной конструкцией для улучшения аэродинамики. Достоинством этих установок является возможность их монтажа на уровне земли.
Геликоидный ветрогенераторы.
Они представляют собой модификацию ортогональных роторов с особой конфигурацией лопастей, что дает равномерное вращение ротора. За счет снижения нагрузки на элементы ротора срок их службы увеличивается.

Ветрогенераторы на основе ротора Дарье
Многолопастные ветровые установки

Многолопастные ветровые генераторы
Ветряки такого типа представляют собой измененный вариант ортогональных роторов. Лопасти на этих установках устанавливаются в несколько рядов. Направляет ветровой поток на лопасти первый ряд неподвижных лопастей.
Парусный ветрогенератор
Основное достоинство такой установки — это способность работать при небольшом ветре от 0,5 м/с. Парусный ветрогенератор устанавливается в любом месте, на любой высоте.

Парусный ветрогенератор
Из преимуществ можно выделить: маленькую скорость ветра, быструю реакцию на ветер, легкость конструкции, доступность материала, ремонтопригодность, возможность изготовить ветряк своими руками. Недостаток — это возможность поломки при сильном ветре.
Ветрогенератор горизонтальный

Ветрогенератор горизонтальный
Эти установки могут иметь разное число лопастей. Для работы ветрогенератора важно выбрать правильное направление ветра. Эффективность работы установки достигается небольшим углом атаки лопастей и возможности их регулировки. У таких ветрогенераторов небольшие габариты и вес.